Research Grant-Based Projects and Research Collaborations
Tests in Orbit
2019- Date | Abdul Syed, Steven Zay and Haris M. Khalid
Energy in Space
The ready availability of energy is a requirement in the space settlement. The concept changes radically as compared to the way processes are usually engineered on Earth. The rationale for going into space has to do with a) retrieving energy, and b) exploring venues for energy generation. While doing that, an adequate focus is required towards:
- Monitoring and inference in space-based energy applications,
- Cascading failures in complex space-based solar and smart grid networks,
- Interplay between communication and control in space-based energy systems,
- Large-scale optimization with space-based energy applications,
- Data security and privacy in space-based energy systems,
- Distributed monitoring and control in space-based smart grids,
- Network economics and game-theoretic studies in space-based energy applications.
Details of opportunities in space can also seen in Fig. 1.
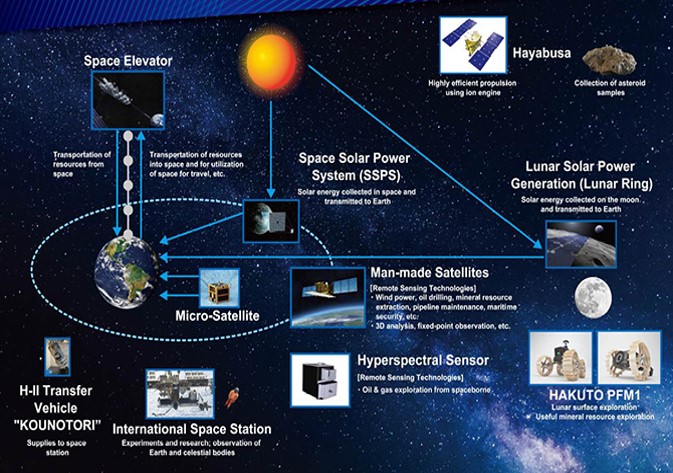
Figure 1. Opportunities in Space
Area-specific energy opportunities while aiming at: a) Exploring Synergies in Space, b) Terrestrial Energy Applications, c) and Contribution Towards Development of a Sustainable World Energy Grid (in Fig. 2) are:
- Space Power Station (SPS)
- Earth observation and monitoring (forecasting, planning, grid inspection).
- Space-based data and communication networks (grid synchronization, metering).
- Distribution network (engagement, wireless power transfer).
- Energy critical infrastructure monitoring (localized conditions and changes throughout vast land areas over time).
- Vegetation monitoring (tree species and height estimation, position of trees, vegetation growth).
- Assets maintenance and recovery (rapid recognition of damages after storm, clearance detection and prioritization of areas, supervision of vegetation clearance).
- Wind/wave forecasting for offshore wind farms (production forecast, wind farm potential revenues, maintenance).
- Water Flow Monitoring and Prediction Service (water flow monitoring and prediction service, data assimilation).
- Distributed Energy Networks (Automatic load balancing/self-healing of the electricity grid, Virtual Power Plants, Demand Response (DR), Predictive outage and maintenance, Integration of Electric Vehicle (EV) fleet into the energy system., Distributed energy storage (DES) systems, Predict and optimize load dispatch, Household storage units reliability, Non-technical energy losses, Utilities market strategy).

Figure 2. Exploring Synergies in Space
Battery Cell Real-time Simulator: Applications to Vehicle-to-Grid Technology, Electric Vehicles and Smart Grids (2019-Date)
2018–Date | Haris M. Khalid, Zimran Rafiq, S. M. Muyeen, Mohammed El-Moursi
Publications
1- H. M. Khalid, Z. Rafique and S. M. Muyeen, `Communication Systems in Distributed Generation: A Bibliographical Review and Frameworks’, IEEE Access, pp. 207226–207239, December 2020. [OPEN-ACCESS-URL]
2- H. M. Khalid, and J. C. -H. Peng, `Bi-directional Charging in V2G Systems: An In-Cell Variation Analysis of Vehicle Batteries’, IEEE Systems Journal, vol. 14, no. 3, pp. 3665–3675, September 2020. [URL][preprint]
3- H. M. Khalid, Q. Ahmed, J. C.-H. Peng and G. Rizzoni, `Current-Split Estimation in Li-Ion Battery Pack: An Enhanced Weighted Recursive Filter Method’, IEEE Transactions on Transportation Electrification, pp. 402-412, vol. 1(4), December 2015.[URL][preprint]
4- H. M. Khalid, Q. Ahmed and J. C.-H. Peng, `Health Monitoring of Li-Ion Battery Systems: A Median Expectation-based Diagnosis Approach (MEDA)’, IEEE Transactions on Transportation Electrification, pp. 94-105, vol. 1(1), June 2015.[URL][preprint]
5- H. M. Khalid, `Battery Cell Simulator Real-Time Training Application towards V2G Communication Technology’, Industrial Training, SunLux Technologies, Sharjah, UAE, March 2021.
6- H. M. Khalid, `Battery Cell-Simulator Real-Time Training Application to Electric Vehicles and Smart Grid’, Didactic Systems and Technology, Sharjah, UAE, June 2018.
7- H. M. Khalid, Q. Ahmed, J. C.-H. Peng and G. Rizzoni, `Pack-Level Current-Split Estimation for Health Monitoring in Li-Ion Batteries’, American Control Conference (ACC), Boston, MA, USA, 6-8 July, 2016. [URL] [preprint]
Opportunity and Applications
An effective health monitoring and safe operation of Li-Ion batteries is quiet crucial for the automotive and energy sector. This can be further observed in Fig. 1 and 2, where the full operation is dependent on the power pack and battery management system (BMS).
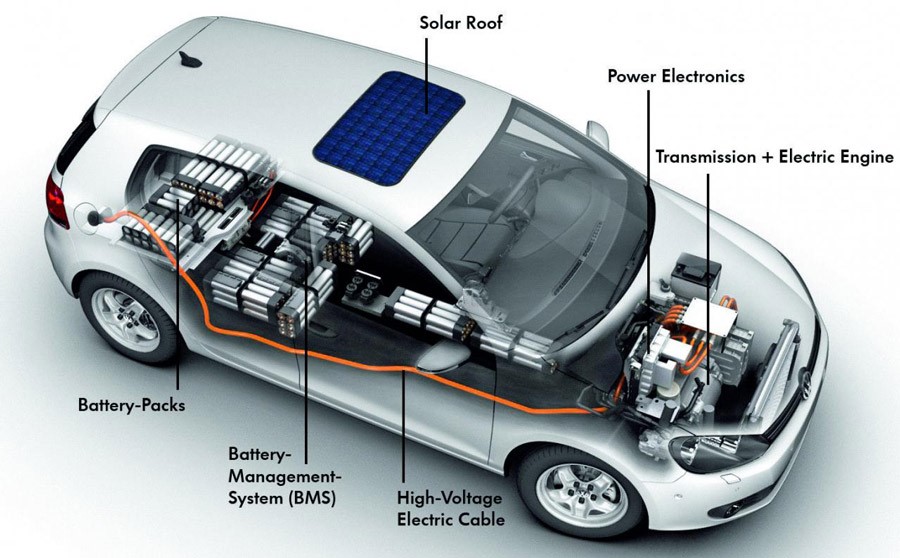
Fig. 1 Working structure of an electric vehicle
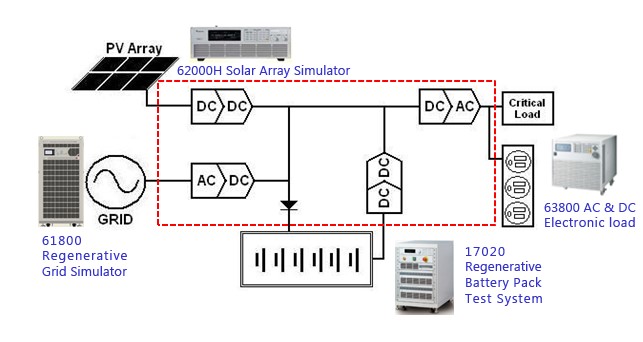
Fig. 2 Fusion of battery storage systems into smart grids
There could be many applications of battery systems. At storage level, these applications could be further divided into 1) generation level, 2) transmission level, 3) distribution level, and 4) customer level. At generation level, applications are a) arbitrage, b) capacity firming, and c) curtailment reductions. At transmission level, they are a) frequency and voltage control, b) investment deferral, c) curtailment reduction, and d) black starting. Distribution level comprises of a) voltage control, b) capacity support, and c) curtailment reduction. Customer level covers a) peak shaving, b) time of use cost management, and c) off-grid supply.
However, the security risks and further complications in battery packs can prove be very catastrophic. The following are sample cases on such possibilities:
-
To meet the power capacity and voltage requirements of EVs and power grids, the battery pack is composed of more than hundreds of Li-ion cells connected in-series or in-parallel. However, each cell may exhibit variations in terms of capacity, temperature, dynamics, and aging characteristics. This may be due to adopted production technology, tolerances, material defects, and contamination. Moreover, in actual working conditions, the temperature distribution among cells is also different due to the arrangement and position of cells. All these factors can eventually result to a lapse in uniformity between the individual cells, which may be reflected by the SOC divergence or internal resistance [1].
-
The in-pack cell with the lowest available capacity determines the overall rating of the entire pack, because it will be the first to be completely depleted during the discharging stage. Similarly, the charging of the pack will stop when the in-pack cell with the lowest available capacity is full, despite others are still not fully charged. As a result, the power capacity of the entire battery pack will be affected [2]-[4].
Considering the above mentioned concerns, the aim here is to develop new methods for real-time characterizing and adaptively managing battery systems to ensure their optimal and healthy operation, which is critical for accomplishing clean, efficient and sustainable energy development in transportation and power sectors.
Proposed Approach and Equipment
The general objective of the proposed project is to develop a Hardware-in-Loop test bench, which would be a prototype model for the Battery cell simulator. D-SAT based Battery Simulator could give a custom solution of hardware-in-loop (HIL) Testing system as shown in Fig. 3.
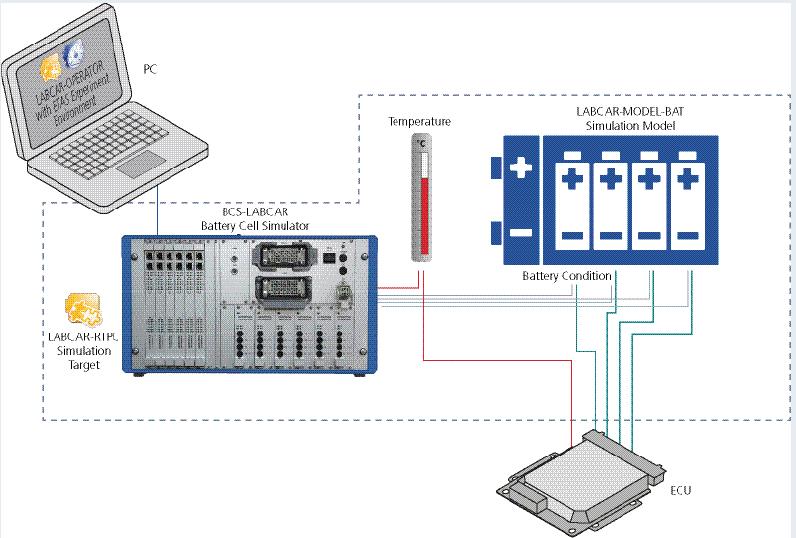
Fig. 3 Battery cell simulator
The proposal aims to establish guidelines for developing novel schemes capable of monitoring dynamics of a battery power pack, and predicting the variation of faults and other disturbances. It should be noted that for this purpose, separate expert systems need to be developed for each specific test case.
The specific objectives of the project are defined as follows:
-
Set up models and test bench of battery power pack for electric vehicles and power sector faults and their characterization.
-
Accurate battery characterization via real-time and joint estimation for achieving adaptive and optimal battery management.
-
Hardware implementation of a real-time prototype battery cell simulator system showing a smart On-Board Diagnostic system.
-
Publish novelties in top-tier Journals which could prominently enhance the vision of HCT towards innovation and applied research.
-
Educational tools and programs to enhance the educational effort in vehicle electrification and sustainable energy development.
Training Session and Equipment Set-Up
The training session took place after the arrival of equipment. Possible applications were discussed with particular focus on batteries as 1) Energy Storage devices for smart grid, and 2) Energy source device for electric vehicles. The attendees were a diversified audience from electronics, mechanical engineering and IT background. A system and component-level understanding was created to connect all the disciplines. The test cases for different applications are yet to be developed, which will further lead to a series of training sessions. Fig. 4 shows a group photo at the completion of training session. Attendees were awarded with professional development hours (PDH) certificates.

Fig. 4 Training session held on June 27-28, 2018
References
[1] M. Dubarry, N. Vuillaume, and Y. B. Liaw, “Origins and accommodation of cell variations in Li-ion battery pack modeling,” Int. J. Energy Res., vol. 34, pp. 216–231, Dec. 2009.
[2] U.S. Department of Energy Vehicle Technologies Program, “Battery test manual for plug-in hybrid electric vehicles,” Idaho Nat. Lab., U.S. Dept. Energy Nat. Lab., Operated by Battelle Energy Alliance, revision 3, Sep. 2014.
[3] H. Dai, X. Wei, Z. Sun, J. Wang, and W. Gu, “Online cell SOC estimation of Li-ion battery packs using a dual time-scale Kalman filtering for EV applications,” Appl. Energy, vol. 95, pp. 227–237, Jul. 2012.
[4] J. Wang, Z. Sun, X. Wei, and H. Dai, “Study on the uneven cells problem of the power battery pack in the automotive application by ECM,” Phys. Proc. B, vol. 24, Part B, pp. 984–996, 2012.
Cyber-Attack in Power Systems [An Internal Funded Project, Research Collaboration]
2014–Date | Haris M. Khalid, S. M. Muyeen, Mohammed El-Moursi, Magdi S. Mahmoud, and Jimmy C.-H. Peng
Publications
1- M. S. Mahmoud, H. M. Khalid, and M. M. Hamdan, Textbook Title, `Cyber-physical Infrastructures in Power Systems: Architectures and Vulnerabilities’, 1st Edition, El Sevier — Academic Press (AP), ISBN 9780323852616, pp. 1–500, November 01, 2021. [URL]
2- H. M. Khalid, and Ahmed Al-Durra, Book Chapter Title, `Bad-Data Detection in Smart Grid’, IET — Communication, Control and Security Challenges for the Smart Grid, February 2017. [URL][preprint]
3- H. M. Khalid, S. M. Muyeen, and J. C.-H. Peng, `Cyber-Attacks in a Looped Energy-Water Nexus: An Inoculated Sub-Observer Based Approach’, IEEE Systems Journal, vol. 14, no. 2, pp. 2054–2065, June 2020. [URL][preprint]
4- Ahmed S. Musleh, H. M. Khalid, S. M. Muyeen, and Ahmed Al-Durra, `A Prediction Algorithm to Enhance Grid Resilience towards Cyber Attacks in WAMCS Applications’, IEEE Systems Journal, vol. 13(1), pp. 710-719, March 2019. [URL][preprint]
5- H. M. Khalid, and J. C.-H. Peng, `Immunity Towards Data-Injection Attacks Using Track Fusion-Based Model Prediction’, IEEE Transactions on Smart Grid, vol. 8(2), pp. 697-707, March 2017.[URL][preprint]
6- H. M. Khalid, and J. C.-H. Peng, `A Bayesian Algorithm to Enhance the Resilience of WAMS Applications Against Cyber Attacks’, IEEE Transactions on Smart Grid, Special Issue – Theory of Complex Systems with Applications to Smart Grid Operations, vol. 7(4), pp. 2026-2037, March 2016. [URL][preprint]
7- Ahmed S. Musleh, Mahdi Debouza, H. M. Khalid, and Ahmed Al-Durra, `Detection of False Data Injection Attacks in Smart Grids: A Real-Time Principle Component Analysis’, Accepted for publication in IEEE 45th Annual Conference of the Industrial Electronics Society (IECON), pp. 2958–2963, Lisbon, Portugal, Oct. 14-17, 2019. [URL][preprint]
8- A. Alamin, H. M. Khalid, and J. C. H. Peng, `Power System State Estimation Based on Iterative Extended Kalman Filtering and Bad Data Detection using Normalized Residual Test’, IEEE Power & Energy Conference, Illinois, USA, 20-21 February, 2015. [URL] [preprint]
Synopsis
Modern electrical grids demand accurate sensor measurements and communication channels to perform effective coordinated operations. Recent deployment of PMUs in transmission networks enables real-time grid dynamics to be recorded and transmitted to local data acquisition servers. Subsequently, signal processing algorithms can be applied to extract system information for online grid operations. However, the close coupling between cyber and physical operations can make system operations vulnerable to cyber-attacks.
In this project, the focus was toward cyber-attacks in the form of data injections. Abnormal data superimposed into collected Synchrophasor measurements can cause false system information to be interpreted by installed monitoring algorithms. This can then lead to delays in mitigation actions. Among monitoring schemes using PMU measurements, state estimation and oscillation detection are more popular applications. Despite several methods are proposed for bad data detection in state estimation, none explored in the field of oscillation detection. Thus, the motivation of this project improves the immunity of oscillation detection schemes against data injections. This project contributes toward proposing a signal processing solution to enhance the resilience of existing oscillation monitoring methods against contaminated measurements. Since data-injection attacks in electrical grids can be considered as a regional event, the use of distributed architecture is an adequate option against data contaminations. However, given the uncertainties of data injection attack in the prescribed error statistics, it can be inappropriate to spend a huge amount of computational power to filter erroneous information as used by the algorithmic structure.
Simulation Results
Generally, monitoring algorithms shall meet: 1) robustness against random fluctuations and bias; and 2) the computational cost of the propagation of estimation of each electromechanical oscillations. To achieve the robustness, while optimizing the computational complexity, constraints of perturbation and random fluctuations shall be considered. The aim is to maintain the accuracy of extracting oscillatory parameters as well as detecting potential monitoring nodes that are being attacked. In this paper, we integrated a modified KLPF-based smoother into the proposed TFMP approach. This concept is inspired from multisensor data fusion theory and derived to support the formulation of providing immunity toward data-injection attacks. Here, the TFC represents the collection of measurements from all local sensors. The concept is developed in a distributed feedback environment. To understand the integration of data-injection attacks into the oscillation monitoring application, an overview of the proposed multisensor TFMP is illustrated in Fig. 1. The considered scenario assumed that the attacker is smart enough to inject data that can imitate regular variations of small-signal system dynamics. TFMP can resolve this concern by manipulating estimated oscillation parameters from all local sensor monitoring nodes. In this project, a local sensor monitoring node refers to a site where KLPF-based smoother will b applied to extract oscillation parameters from PMU measurements collected at a substation. Furthermore, each monitoring node is assumed to be able to interact with its neighbors through substation communication channels. The estimated parameters are then communicated to the TFC and followed by track association and track fusion at the global level. Note the TFC is developed to compute and minimize the errors of filtering, prediction, and smoothing within each local sensor monitoring node.
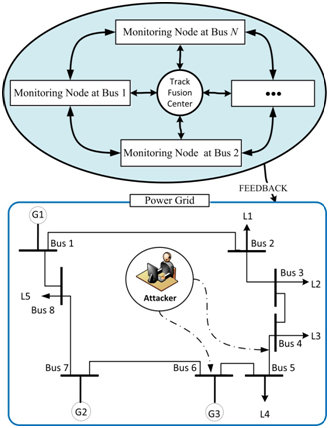
Figure 1 Proposed TFMP scheme to estimate and detect data-injection attacks
Validation of the proposed TFMP estimation scheme is conducted using simulated synchrophasor measurements collected from the IEEE 39-Bus New England system as shown in Fig. 3. Modeling details are based on [27] and [28]. In this paper, synchrophasor measurements are collected from buses 15–17, 29, 30, 35, and 37–39. From these data, three dominant electromechanical modes are detected using Welch power spectral density. Their predisturbance values are: 1) 0.69 Hz with a damping ratio of 3.90%; 2) 1.12 Hz with a damping ratio of 5.71%; and 3) 1.17 Hz with a damping ratio of 5.62%. The 0.69 Hz mode will be considered as an interarea oscillation. All loads are continuously being subjected to random small magnitude fluctuations of up to 10 MW/s. Furthermore, the system is excited by four large-signal disturbances over a period of 60 s. First, a three-phase-to-ground fault occurred at bus 24 at 5 s and is cleared after 0.1 s. Second, the active and reactive power demands of the load connected at bus 21 is ramped up by 30% and 10% over 10 s, respectively. Third, the line connecting buses 16 and 17 Fig. 3. Single line diagram of the IEEE 39-Bus New England System. is disconnected at 25 s and reconnected after 5 s. Lastly, the active and reactive load demands at bus 4 increased by 20% and 10%, respectively. This occurred over a 5 s ramp. All simulations are performed using DIgSILENT PowerFactory Ver. 15.1 [29]. From the collected measurements, monitoring schemes updated the averaged oscillatory parameters every 5 s. In this paper, the proposed method is evaluated against the distributed technique of [18]. To simulate deliberate attack scenarios, data injections are carried out in the collected synchrophasor measurements. Since all three electro-mechanical modes are observable at buses 16 and 17, these two locals are selected as attack nodes. Their neighboring nature as shown in Fig. 3 helped to create a situation of regional attacks on measured data. Simulated attack scenarios at buses 16 and 17 are as follows. 1) First Injection: Random data injections are introduced at bus 16 from 7 to 12 s. 2) Second Injection: Signal with relatively high energy potency are injected at bus 16 from 22 to 27 s. 3) Third Injection: Small signature of random sinusoidal waveforms are introduced at bus 16 from 44 to 49 s. Also, ambient disturbance-like injections are introduced at bus 17 from 48 to 55 s. 4) Fourth Injection: Small signature of random sinusoidal waveforms are introduced at bus 16 from 44 to 49 s. Also, a data-repetition attack was introduced at bus 17 from 55 to 60 s. This attack replaces the normal oscillation behavior with those recorded at bus 17 from 40 to 45 s. The first injection illustrates a pure random attack with no bias toward any signal characteristics. The second injection imitates an attack attempting to bring down a local/regional network. The third injection represents an ambient attack with the aim to generate a cascading failure in the longer form that can often led to wide-area blackouts. Ambient disturbance-like injections are also introduced at bus 17 to create a multisensor injection attack situation as part of the third injection scenario. The fourth injection represents a data-repetition attack at bus 17. The purpose of injecting different nature of signals and at multiple locations are to assess the robustness of the proposed scheme. These data segments, outlined in black, are added to the original synchrophasor measurements, colored in red, as shown in Fig. 2(a) and (b).
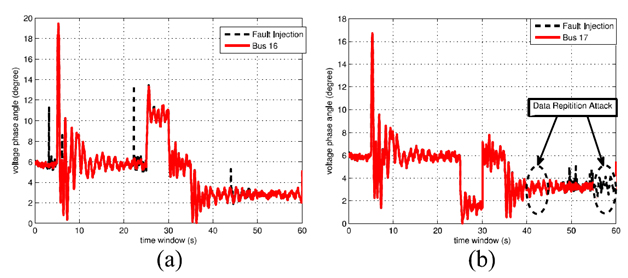
Figure 2. Profile of (a) bus 16 and (b) bus 17 with random fault injections
The removals of ambient grid-like dynamics are illustrated in Fig. 3 for bus 16. Referring to these plots, the proposed scheme iteratively minimize data abnormalities by removing them as outliers using the derived cross-covariance relationships.
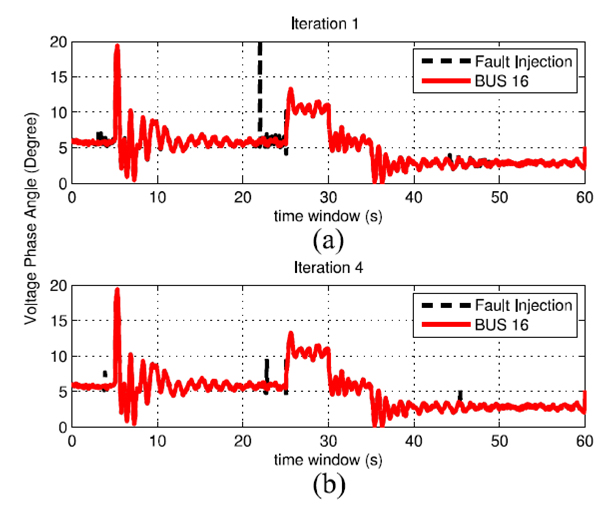
Figure 3. Performance of the proposed method for bus 16 at iteration (a) 1 and (b) 4.
In this paper, the proposed TFMP-based monitoring scheme is proposed and demonstrated to estimate power oscillations modes during data-injection attacks. The model prediction property of the algorithm has helped to remove bias and noise while accurately extracting the system parameters. It is further facilitated by the derived diagonalized interaction filter, which tackles the error covariance in the form of subsystems, and thus improving the initial oscillatory state estimates. As a result, the incorporation of the proposed algorithm into oscillation detection has provided more accurate results than existing oscillation monitoring schemes in the presence of data-injection attacks. The immunity of monitoring applications against intentional data injections has been enhanced. In the future, studies to quantitatively verify the effectiveness and robustness of the proposed method to more adverse non-regional threats will be conducted.
Mitigating Inter-area Oscillations in Power Systems [An Internal Funded Project]
2013–Date | Jimmy C.-H. Peng and Haris M. Khalid
Publications
1- H. M. Khalid, and J. C.-H. Peng, `Improved Recursive Electromechanical Oscillations Monitoring Scheme: A Novel Distributed Approach’, IEEE Transactions on Power Systems, vol. 30(2), pp. 680-688, March 2015. [URL][preprint]
2- H. M. Khalid, and J. C.-H. Peng, `Tracking Electromechanical Oscillations: An Enhanced Maximum-Likelihood Based Approach’, IEEE Transactions on Power Systems, vol. 31(3), pp. 1799-1808, May 2016. [URL][preprint]
3- Enhancing Situational Awareness in Electrical Power Infrastructures — Invited Talk at Center of Automotive Research, OSU, Columbus, USA.
4- Applications using Phasor Measurement Units — Invited Talk at ABB Middle East User Group Meeting, Abu Dhabi, UAE.
5- Smarter Grid: Enhancing Power System Security — Invited Talk at Ventyx, Abu Dhabi, UAE.
Synopsis
Electromechanical oscillations are power transfers between groups of interconnected synchronous generators within the transmission system. Conservative power transfer limits are set to prevent lightly damped inter-area oscillations, which then lead to transmission bottlenecks. To increase transmission margins, wide-area monitoring system (WAMS) was established. WAMS allows real-time Oscillatory parameters to be extracted using Synchrophasor measurements collected from phasor measurement units (PMUs) installed at substations. Oscillatory parameters are traditionally extracted using modal analysis. Since linear state-space models cannot guarantee accurate representation of nonlinear system dynamic characteristics, time-domain based techniques were introduced. These methods are primarily based on analyzing Synchrophasor measurements obtained from one location. However, the shortcoming of computing modal parameters from one location is that estimation errors may incur due to lack of observability. Another challenge among published methods are tracking oscillations having similar frequencies. The contribution of this work is to enhance the observability of inter-area oscillation, and improve the detection capability of electromechanical oscillations having similar frequencies.
This is accomplished by revamping the oscillation state estimation, thus extracting MAP information using a proposed distributed detection scheme named as EM-based FB KLPF. The Kalman like Particle filter is preferred over the basic Kalman filter because it affords a better defined observation matrix. The proposed scheme is based on extensions of the authors’ earlier works. This is attained by utilizing a distributed architecture and fusing system dynamics contained within multiple substation signals. An overview of the EM-based FB KLPF is illustrated in Fig. 1.
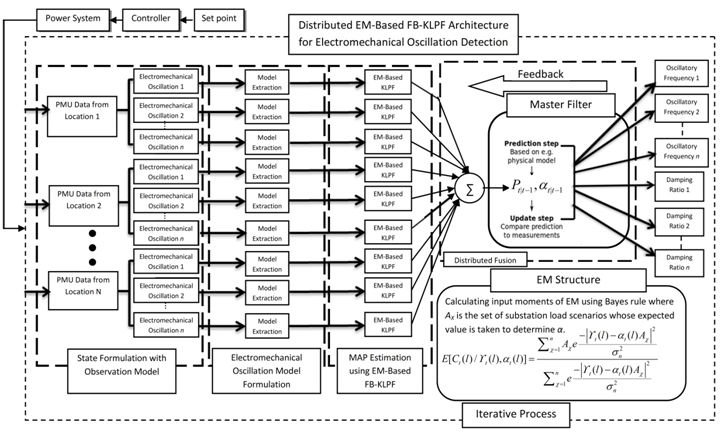
Figure 1 Proposed Scheme
Simulation Results
The proposed method was exhaustively assessed under different network operating conditions as shown in Table I- Test Case I. Test Case I analyzed Synchrophasor measurements collected from IEEE 39-Bus New England system simulated in DIgSILENT PowerFactory ver. 15. Each generator is a 6th order model and are all equipped with an Exciter (IEEET1). Apart from Gen 39, all units are installed with a Power System Stabilizer (STAB1), and a 1st order governor from [21]. Test Case II examined actual Synchrophasor measurements gathered from the New Zealand grid. In addition, the proposed method is referenced with two mainstream techniques; 1) Kalman filter [8], and 2) Prony analysis. Damping ratios and oscillatory frequencies are computed from the master oscillation estimate. All detections are computed using voltage phase angles sampled at 50 Hz.
The proposed method analyzed Synchrophasor measurements collected from Bus 15, 16, 17, 29, 30, 35, 37, 38, and 39. The predecessor, Kalman filter, was applied to extract oscillatory information at Bus 16. By using Welch power spectral density analysis, three electromechanical oscillations were identified from measurements around Bus 16. Their pre-disturbance values are: 1) Inter-area mode with a frequency of 0.73 Hz and a damping ratio of 3.9%, 2) Local mode with a frequency of 1.12 Hz and a damping ratio of 5.7%, and 3) Local mode with a frequency of 1.17 Hz and a damping ratio of 5.6%. In this study, the grid suffered from four events over a period of 60 second. They are: 1) At 5 second: Bus 24 experienced a three-phase-to-ground fault, which was cleared after 0.1 second. 2) At 20 second: The active power of the load connected at Bus 21 was increased by 30% and the reactive demand by 10%. This was ramped over 10 second. c) At 25 second: Line 16–17 experienced an outage. The line was later reconnected at 30 second. d) At 45 second: The load connected at Bus 4 increased its active and reactive power demands by 20% and 10%, respectively. This occurs over a 5 second ramp.
To imitate real-world dynamics, all loads were continuously perturbed with random small-magnitude fluctuations of up of 10 MW over one second. Note that the modal parameters will vary slightly due to events occurred in the system. For this test case, the detection capability of the proposed method is compared with its Kalman Filter. The computed oscillatory parameters, over a window size of 5 seconds, are listed in Table I. In general, both techniques tracked the inter-area oscillation with reasonable accuracy when it is the dominating mode within the analyzed measurements. However, Kalman filter was not able to separate the two local oscillations having similar frequencies. Instead, it suffered from mode-mixing by treating the two local modes as one. The reason is Kalman filter is originally designed to monitor the dominant mode in ringdown events. Its estimation accuracy decreases when detecting electromechanical oscillations having similar frequencies or under ambient conditions. In contrast, the distributed EM-based FB KLPF was able to detect both local oscillations with reasonable precisions. This is due to its architecture of employing local filters at every metering location. The distributed architecture also provides an updated feedback for the error covariance and state estimation at each metering location. Depending on the type of disturbance and its associated energy density, the inter-area oscillation may not be the dominant electromechanical mode in all metered locations. This can occur if the measurements are dominated by transient or ambient conditions. Consequently, the undistributed nature of Kalman Filter made it become locational dependent. For example, the local line outage event at 25 second caused the measurements collected at Bus 16 to be overwhelmed by transient dynamics. As a result, the accuracy of the estimated inter-area oscillation decreased in the 25–30 second window while the local mode remained similar to its previous estimated values. Of course, the nonlinearity of transient dynamics was also contributing to the estimation inaccuracies. Another example is the ambient dominated measurements collected from Bus 16 between 35 to 60 seconds. In this case, continuous load perturbations excited the local modes. In contrast, the energy of the inter-area oscillation was relatively similar to some of the load perturbations. Consequently, the estimation accuracy of inter-area mode decreased during this time. The improved accuracy in 50–55 second window may be due to the load ramp event that occurred nearby, which excited the inter-area mode. In the contrary, the monitoring capability of the distributed EM-based FB KLPF was less impacted. By mixing with measurements obtained from healthy locations, potential estimation inaccuracies from analyzing nonlinearity or ambient dominated measurements can be compensated. Even under highly ambient conditions at 55–60 second window, the proposed method demonstrated adequate noise-resistant and extracted oscillatory parameters with reasonable precisions. This can be achieved by using EM-based maximum likelihood technique to detect the incipient inter-area oscillation with the help of the observation matrix of KLPF structure.
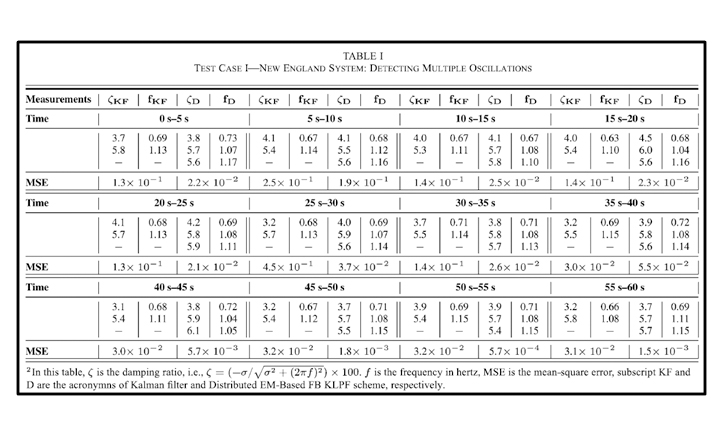
The estimation accuracy of existing KF is enhanced using a distributed structure of EM algorithm encapsulated with initial correlation information from FB-KLPF. The proposed algorithm is able to operate under noisy/ambient conditions. It was also demonstrated to be capable of detecting oscillations having similar frequencies. Monitoring comparison of the scheme was made with existing Kalman filter and Prony analysis, which are used by the power utilities. The limitation of proposed method is the computational complexity. However, this may be resolved by assigning independent functions for each substation using parallel computing. In the future, studies to quantitatively verify the effectiveness and robustness of the proposed method to false measurements will be conducted.
Senior Design and Degree Projects
Eye-Lid Based Steering Control in Vehicles: A Novel Method for Medical Emergencies
2018- 2019 | Haris M. Khalid
Students | Eman Y. M. Al-Ali, Mariam A. Al Ansari, Huda G. Ali, Fatima Yousif
1- Estimation of Vehicle Steering Wheel Angle: An Unscented Kalman Smoother-Based Design — Article published in 8th International Conference on Industrial Technology and Management, Cambridge, UK. [URL: https://ieeexplore.ieee.org/document/8710653]
Synopsis
In recent years, there has been a growing interest in intelligent and adaptive vehicles. A foremost reason on such an initiative could be for an adequate prevention of highway crashes fatal incidents. According to a survey, more than 10 million car crashes happen every year due to a primary cause of drowsiness or fatigue. However, the reality of accidents happening due to drowsiness or fatigue is quiet debatable. This is due to the fact that these symptoms could be observed even due to the cardiac attacks or impacts, which could lead to the immobility of the human body thereby causing the crashes. However, in all the severe strokes and locked-in situations, the eye ball muscles are still able to be mobilized. This project takes the incentive from these situations, where an eye-lid based steering control is proposed to contribute towards fatigue detection mechanism. 1) Firstly, this would help to monitor the unusual and lack of control by the driver, 2) and then take over the controls of the vehicle by considering the human eye-ball as the main source of steering control, 3) thereby performing a function by monitoring the relative velocity of eyelid movements and blinks. The block diagram of the concept can be seen in Fig. 1. Fig. 2 shows the working prototype.
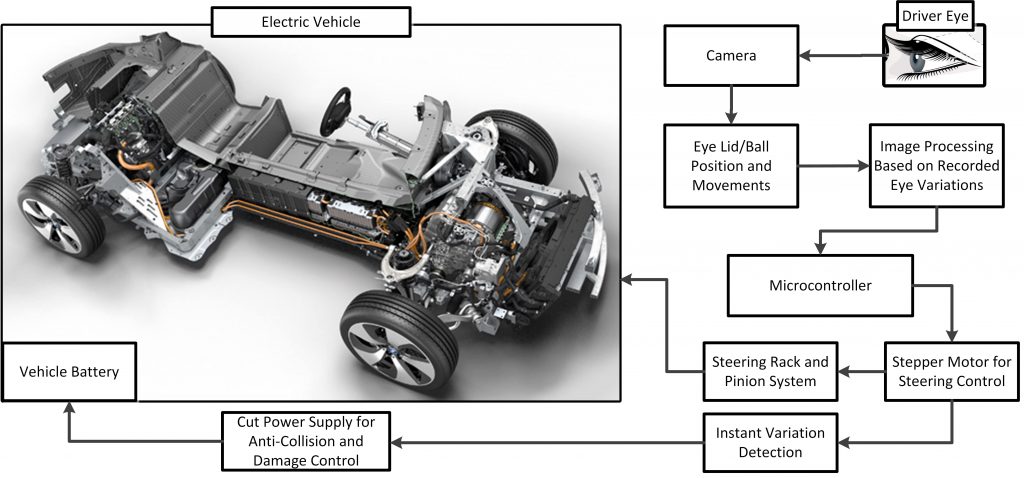
Fig. 1 Block Diagram of Eye-Lid based Steering Control Concept
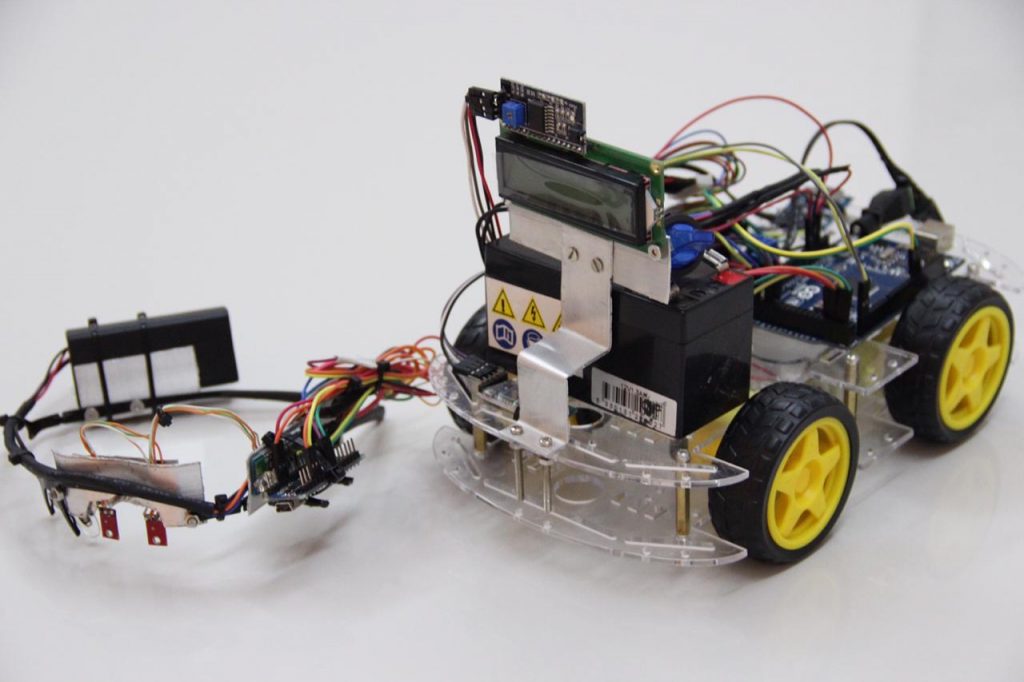
Fig. 2 Prototype of Eye-Lid based Steering Control
Adaptive Seat-Based Safety System
2018- 2019 | Haris M. Khalid
Students | Shamma A. Baniyas, Amna T. Zayed, Ayesha A. Ali, Meera M. Saleem, Sara F. Al Zarooni
1- Won HCT System-wide Design Projects Competition.
Synopsis
Despite of adaptive safety systems, the high rise of vehicle crashing has touched to mesmerizing number in recent years. These accidents may lead to situations having permanent and fatal injuries. To restore impacts of a crash, the basic form of any vehicle safety system is the seat-belt. However, cases have been reported, where drivers have received severe injuries to abdominal and neck while wearing the seat-belt. This was due to the snubbing action of the safety belt system, which results in different patterns of internal injuries. This project proposes to enhance the safety feature of the seat system. Fig. 1 shows the working prototype.

Fig. 2 Prototype of Adaptive Seat-Belt Based Safety System
Resilient Autonomous Vehicle: A Concept Towards Harsh Environment
2018- 2019 | Haris M. Khalid
Students | Fatma A. Al-Mulla, Shamma H. Al-Shamsi, Alya I. Al-Matrooshi, Eman N. Al-Abboudi, Fatma I. Al-Marzooqi
1- An Augmented Lagrangian-Based Optimal Control: An Application Towards an Electric Vehicle — Article published in 8th International Conference on Industrial Technology and Management, Cambridge, UK. [URL: https://ieeexplore.ieee.org/document/8710726]
Synopsis
Autonomous vehicles are a vital addition to the intelligent transportation systems. They bring features which could provide enhancements to decision making while improving on information and support systems. Information and support systems involve many applications such as traffic volume stream, speed of vehicles, variation detection, anti-collision systems etc. Moreover, these support systems could be utilized in all-terrains. In this project, it is aimed to provide resilience to the autonomous vehicle. The resilience is focused by its utilization towards harsh environment. The robust features are: 1) human detection, 2) active suspension system using model prediction control, and 3) tire inflation system. The prototype would be tested under different conditions to ensure performance and accuracy. The block diagram of the concept can be seen in Fig. 1. Fig. 2 shows the working prototype.
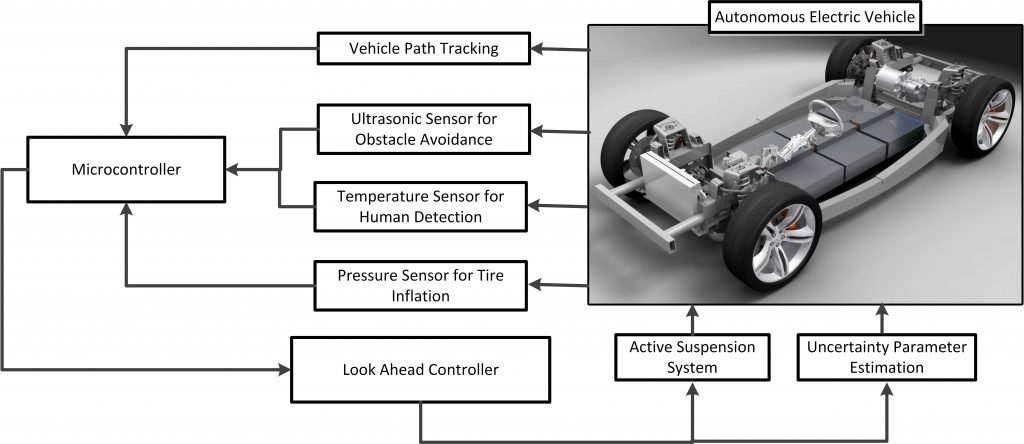
Fig. 1 Block Diagram of Resilient Autonomous Vehicle Concept

Fig. 2 Working Prototype of Resilient Autonomous Vehicle Concept
Self Configured Charging of Electric Vehicles using Electrified Roads
2018- 2019 | Haris M. Khalid
Students | Lamya A. Al-Hajeri, Asma Ahmad, Moza A. Salim, Amal S. Al-Mheiri
1- Self-Charging System of Electric Vehicles: An Optimization Model with no Traffic Interactions — Article published in 8th International Conference on Industrial Technology and Management, Cambridge, UK. [URL: https://ieeexplore.ieee.org/document/8710679]
Synopsis
The lithium-ion battery packs are one of the primary sources of energy for the electric vehicles (EVs). In order to achieve the maximum power, the structural complexity of battery has to be raised with arrays of thousands of cells. However, this has also raised the cost of battery packs which is around half the cost of the EV. This has given the concept of electrified roads (ERs), which could instantly charge the running EVs, while decreasing the size and thereby cost of the battery packs to a considerable extent. In this project, the focus is built by developing self-configured EVs, which could extract some volts and self-charge itself while being in operation. This is achieved by: 1) developing an ER with an adequate wireless power generation, and 2) a self-configured charging mechanism in EV, which could take the wireless power from ER, and utilize it as a useful source of energy for vehicle. The prototype would be tested under different conditions to ensure performance and accuracy. The block diagram of the concept can be seen in Fig. 1. Fig. 2 shows the working prototype.
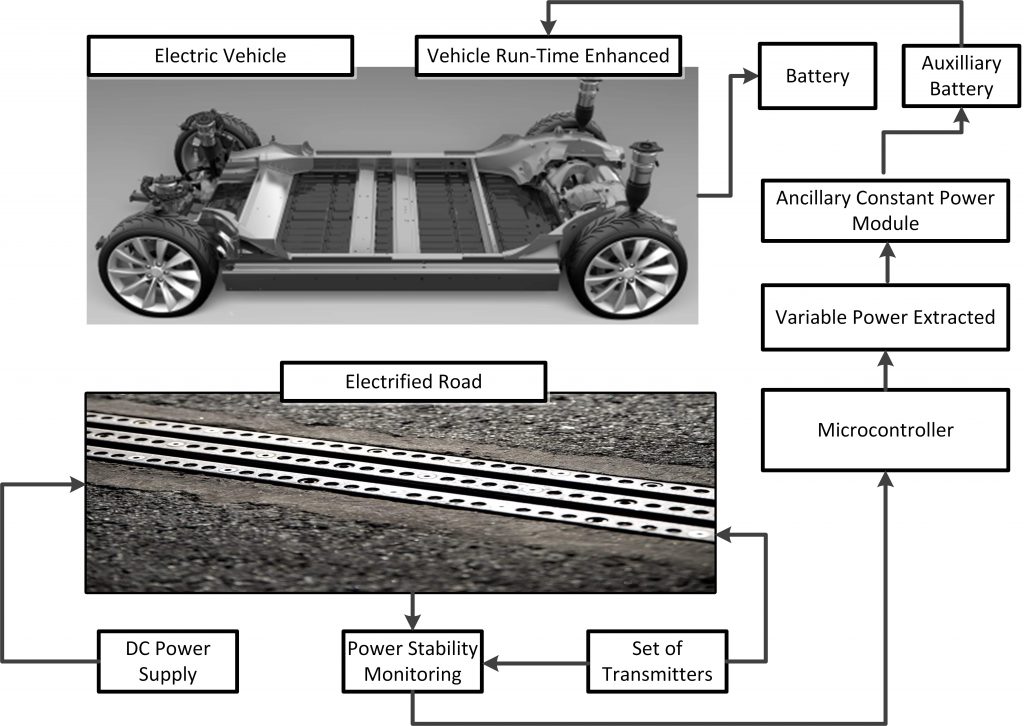
Fig. 1 Block Diagram of Self-Configured Charging of Electrified Roads

Fig. 2 Working Prototype of Self-Configured Charging of Electrified Roads
Flight Estimation of Hand Gesture-Based Quadcopter Control using a Recursive Filter
2018 | Haris M. Khalid
Students | Y. Abdullah, J. Khaled, O. Ahmed, H. Ali, F. Ishaq
1- Optimal Control of a Quadcopter: A Constrained Optimization Problem — Article published in 8th International Conference on Industrial Technology and Management, Cambridge, UK. [URL: https://ieeexplore.ieee.org/document/8710682]
Synopsis
In recent era, the quadcopters have become popular particularly due to their extension as unmanned aerial vehicles and remotely piloted aerial systems. The critical nature of its flight control is one of the main concerns for its advanced operations. In this work, a hand-gesture based control has been designed. This controller has been built on an ultrasonic sensors-based board, thereby controlling the flight, action, and reaction pairs. Firstly, the hand-gesture inputs provide the relevant control signal and reference coordinate systems. Secondly, the input will map the information via micro-controller. In the third step, the installed sensors were modelled using the real sensor measurements. In the fourth step, an offline estimation is carried out for estimating the measurement noise using a recursive filter. Performance evaluation showed accuracy of the proposed scheme. Working prototype can be seen in Fig. 1

Fig. 1 Working Prototype of Hand-Gesture based Quadcopter
Battery State-of-Charge Estimation using Weiner Filter: A Concept Towards a Rotating-Shaft-based Self-Charging Vehicle
2018 | Haris M. Khalid
Students | Y. Ahmed, S. Yousef, S. Sultan
Synopsis
The concept of renewable energy has resulted in a shift from fossil-fuel driven economy to a sustainable economy. This has also initiated a conceptual change in transportation sector, where zero-emission based electric vehicles (EVs) have been launched as a support-system for a fossil fuel free economy. In EVs, the source of energy is non-liquid-based, known as lithium-ion battery packs. However, these structurally complexed battery packs deplete energy in different transient situations, which requires to be estimate. This paper focuses on estimation of state of charge (SOC) of the battery. A test case of a self-charging EV is considered, which produces energy by the belt, pulley and gear arrangement of rotating shaft of the vehicle, and thereby stores energy in an auxiliary battery for depleted situations. The estimation of SOC will provide new physical insights through an analysis of the covariance noise parameters. The algorithm will be tested on a real-time prototype of a self-charging EV to ensure performance and accuracy.
Future Advances Towards an Adaptive Motor Vehicle Parking System
2018 | Haris M. Khalid
Students | S. Al Mualla, M. Thani, A. Khalid, M. Al Shehhi, R. Al Razooqi
1- Stability of a Complex Traffic Flow Problem: A Delay-Dependent Perturbation Filter Design — Article published in 8th International Conference on Industrial Technology and Management, Cambridge, UK. [URL: https://ieeexplore.ieee.org/document/8710698]
Synopsis
Public transportation is very constraining for people and encourages people to use their cars as a means of transportation. Unfortunately, these metropolis and large centers of attraction are not equipped with sufficient parking infrastructure to respond to the inflow of cars. This lack of parking spaces is a consequence of the following factors: 1) conventional parking systems are by far too large in size, 2) require considerable land surface due to the wastage of space. These factors of land scarcity imposes cost and surface restrictions on the feasibility of new conventional parking projects. This resulted in proposing a new automated parking management system. This parking system does not use sequential steps, but rather runs several procedures in parallel, thereby, overcoming queuing during peak demand. A prototype of such a system can be seen in Fig. 1 and 2.

Fig. 1 – Prototype of the Adaptive Parking System

Fig. 2 – Students Demonstrating the Prototype
Traffic Management System – An Extension to Density-based Sensors
2018 | Haris M. Khalid
Students | H. Saeed, R. Khamis, M. Salman
Synopsis
This project is a green automated system that will guide customers inside big buildings. It also gives them an idea about what documents are required to finish their transaction. The advantage of the project is to save time and effort, because the customer will not waste time searching for office locations and the requirement of exact documents.
Self-Guidance inside Big Buildings
2016- 2017 | Thomas Mc Neill and Haris M. Khalid
Project Fabricator | Cesar Esperanza
Students | E. H. Al-Suwaidi, M. Issa, M. A. Salem, R. Ali
Synopsis
This project is a green automated system that will guide customers inside big buildings. It also gives them an idea about what documents are required to finish their transaction. The advantage of the project is to save time and effort, because the customer will not waste time searching for office locations and the requirement of exact documents.
The self-guidance system is a system that specifies into guiding the clients from the moment they enter the building by putting a device on the entrance that contains a map of the building offices with their numbers and a pushbutton with light on each section. The device also contains a tablet device that shows a brief idea about the building and all type of transactions which are offered with the required documents and the desk number. In addition, the device contains an LCD to give instructions to the customer and LED lights with different colors and shapes. It also contains a finger print sensor to detect the employs present and control the office lights. Moreover, the system contains lights with different colors and shapes that are mounted on the floor to guide the customers. The system works from the movement that the employ enters the building by turning-on his office lights. Then, when the customer enters the building, the device will show him the documents that are required for transaction and office number and once he/she press on the maps push button, the LCD will provide the instructions about which light color and shape to follow on the floor. If the employee is present, otherwise it will say that the employee is not present. The goal is to save the clients’ time and efforts by telling him the required documents and showing him the way to the office, since most clients finish their transaction by visitng the building according to uaepedia. The number of online services that are done on FEWA are only 0.2 % of the total transaction. This means that even with the smart technology, people will visit the buildings to finish their transaction. One more goal is to save energy by controlling the employee office lights.

Figure 1 – Self Guidance inside Big Buildings
The system contains a finger print sensor to detect the presence of the employee. Tablet to show the customer information about the building and the transactions that they offer and the section of each. Map with push-buttons to let the customer input the desired section that he/she wants to visit. LCD to give the customer instructions about which LED light color and shape that they need to follow of if the employee is not in his office. LED lights to guide the customer to the desired office.Relays are to control the employee’s office lights. Main controller to control all the sensors and make decisions and the sub-controller to control the office lights by the main controller order. Transmitter and receivers to provide communication path between the main and subcontrollers.
The project prototype worked fine and it was fully functional as per as the design specifications.
Automobile Electricity Generator
2016- 2017 | Thomas Mc Neill and Haris M. Khalid
Project Fabricator | Cesar Esperanza
Students | S. M. Al-Suwaidi, H. Abdullah, A. Mohammed
Synopsis
This project produced electricity using the car exhaust system. This was achieved by using heat difference on both sides of a thermos-electric generator module. The project helped to reduce the amount of the fuel used, followed by reduction in carbon dioxide emissions and increase in fuel efficiency.
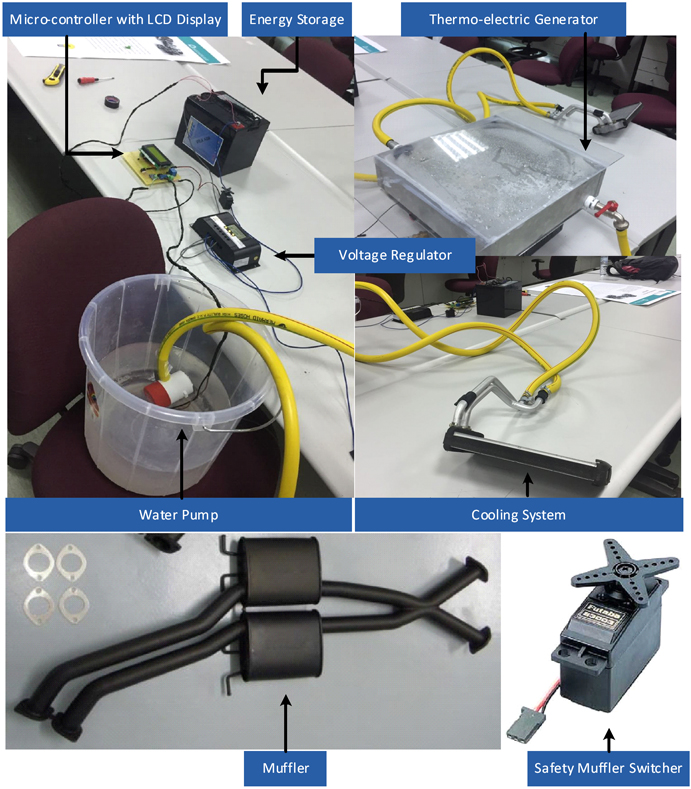
Figure 1. Automobile Electricity Generator
In this era of renewables and clean energy, companies are seeking solutions to reduce the amount of fuel and emissions, which may cause a lot of health problems. This project is based to reduce car fuel consumption. The proposed solution generated electricity using the thermal energy which is limited from car exhaust system. This will create a heat difference on both sides of thermos-electric generator. This will produce energy. The heat differences created consisted of two sides, the hot side will be the car exhaust muffler and the cold side will be cooled by using a cooling system of our design. Energy produced was stored in a 12 volt battery and from there to the rest of the electronic devices in the car. The details of the project can be seen in Figure 1.
Moving to the components, the most important component is the thermos-electric generator module. 21 modules were used by connecting 3 in series, along with 7 in parallel to produce maximum of 21 volts, which will be regulated later by another component to maintain a fixed 12 volt output. We also used the thermal energy emitting form the car muffler system to raise the hot side temperature up to 200 degree Celsius. To achieve a heat difference, a simple cooling system was used, which will recycle the water that will absorb the heat from the cold side, the cooling system parts will contain radiator and a rotational pump along with a fan to recycle and cool water. Cooled water is considered to be one of the best heat transfer fluids. This is due to tis heat capacity and thermal conductivity. It is also compatible with copper, which is one of the best heat transfer materials to use for fluid path. The next component is the voltage switching regulator. This part will regulate the voltage output from the thermo-electric generator modules, which can go upto 21 volts to a stable 13.8 volt output to charge the battery with a sufficient amount of voltage and to protect the battery from high voltage since the battery is only 12 volts, and the best voltage to charge a battery is with a 15 % of the battery capacity. In our case, we used a 12 volt battery + 15 %. The result will be 13.8 volts. Also, this component will automatically stop charging the battery when the battery is full because there will be no voltage difference between the battery and regulator output. Then Arduino microcontroller will monitor the current and voltage in the battery and will display it in a LCD screen. Finally, is the 12 volts battery, which had a capacity of 70 Ah connected to car loads either lights or electronics or electrical devices.
Smart Farm System
2016- 2017 | Thomas Mc Neill and Haris M. Khalid
Project Fabricator | Cesar Esperanza
Students | M. A. Ahmed, S. Mohammad, A. Mohammad, A. Ahmed
Synopsis
This project is about smart farm system. The smart farm system is divided into parts. A section for animals and other part for agriculture. A place was allocated for the animals that contain pots, one for the food and the other one for water these pots. The agriculture part contains sprinkler in order to make the water out for watering transplant. Our goal for this project is to create a system for our country in order to save water because the area that we live in is characterized nu water electricity. Also, it aims to save money for the farmers.

Figure 1. Smart Farm System
In our project, there are many types of sensors and relays that will explain in details each function. Push button is used for agriculture part when someone enters the agriculture part, he will press the push button so that system will turn off. Moreover, a moisture sensor is used. This sensor works to measure the potency of humidity. Whenever, humidity becomes low, the pump will turn on and irrigation system will start while if the humidity becomes high, the pump will turn off and irrigation system will stop. Also, there is a temperature sensor. This temperature sensor will detect the humidity and temperature in the farm and indicate it on LCD screen. Furthermore, there is a water storage tank that is controlled by level sensor. This level sensor will detect the level of water in the tank. If it is low, it will turn off the pump. Also, in the animal urban, there is a servomotor. This servomotor feeds the animal by using push button. Moreover, an LCD is used in this project. This LCD used to show the farm situation and if everything is working well or not.
For this project, we have researched about the sensors and how they worked. The moisture sensor reads analog and sends the signal to the Arduino, after that the Arduino, after that the Arduino covert the signal to digital so the actuator can read it . The moisture sensor has ability to read 300 to 700 in humidity soil. Since, it was found from a survey that many farms are over-wasting water because of the old irrigating ways, the main aim of this project was to reduce the consumption of water in the farms.
Emergency-based Traffic Clearance System
2017 | Haris M. Khalid
Project Fabricator | Cesar Esperanza
Students | S. Mohammed, N. Ahmed, H. D. Mohammed, A. Abdullah, A. Ahmed
Synopsis
Road traffic is an increasing yet an unavoidable concern. This is a by-product of rise of car culture, and it never gives priority to emergency cases. This can lead to hassle and catastrophe towards human life. This work proposes an emergency-based traffic clearance system which can eventually provide precedence to the critical moments. This has been achieved by proposing an override controller built on a micro-controller to accommodate emergency situations.
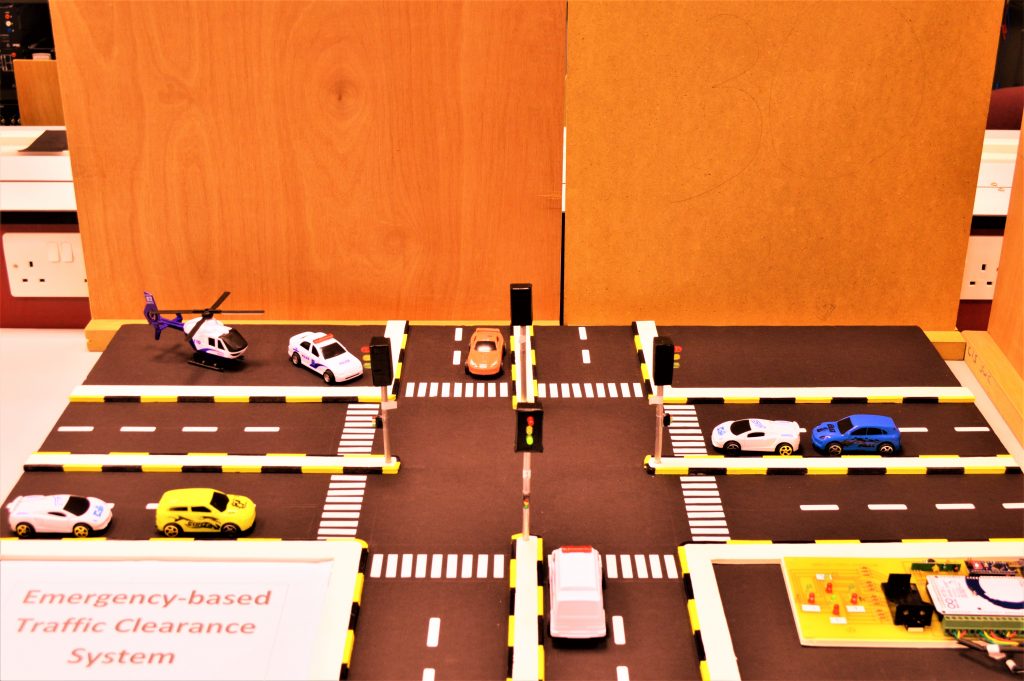
Figure 1. Traffic management system prototype
The proposed override controller using an andruino-based microcontroller accordingly interfaced with sensors to vary the junction timing automatically to accommodate congestion, avoiding unnecessary waiting time at the intersection and giving priority to emergency situations.
Collision Avoidance System: An Application to Metro-Train Shuttle Prototype
2017 | Haris M. Khalid
Project Fabricator | Cesar Esperanza
Students | S. M. Al-Suwaidi, H. Abdullah, A. Mohammed
Synopsis
This project is designed to demonstrate the technology used in metro train movement which are used in most of the developed countries. This locomotive is equipped with a controller, that enables the automatic running of the metro from one station to another. This proposed system is an autonomous vehicle and it eliminates the need of any driver. Thus, any human error is ruled out. Moreover, it proposes a collision avoidance system.

Figure 1. Collision avoidance system prototype
The proposed prototype using an andruino-based microcontroller accordingly interfaced with sensors to vary the junction timing between stations. Moreover, it handles any obstacle collision instantly with the help of installed IR sensors.